 Engineering
Engineering
Field testing on Toronto public courts


Lab testing is comfortable. The lights are good. The floor is flat. The wifi works. The court at Christie Pits at 4pm on a Saturday in August is none of those things.
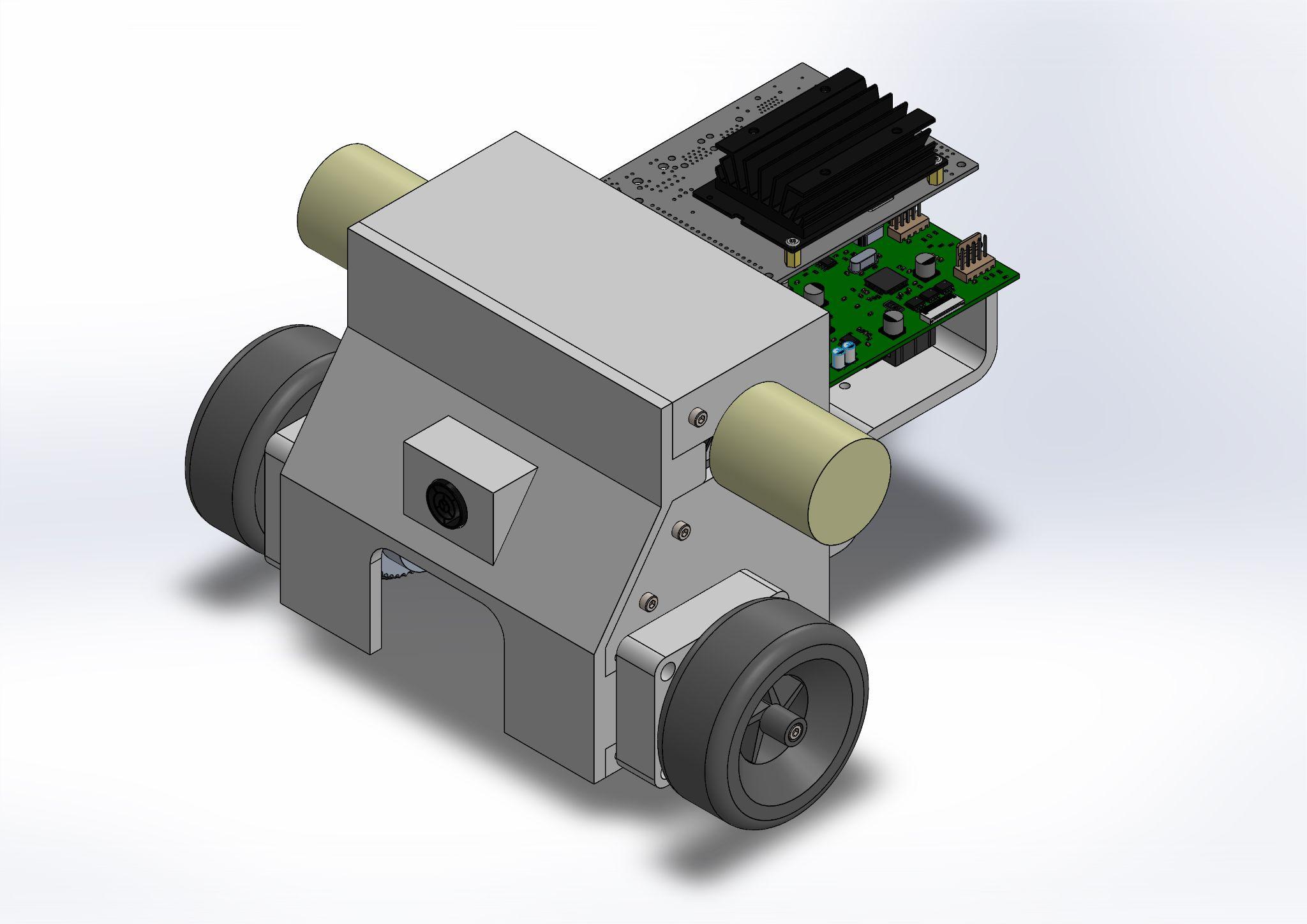
This is a field log from a summer of dragging the Vive prototype to real Toronto public courts.
What broke
Roughly in the order we hit each issue:
Glare. A wet hardcourt at 11am reflects enough light to wash out the camera. The detection model returned almost zero confidence balls for the first 90 seconds of one session. We added a small physical hood over the lens; problem solved.
Cracks. Public hardcourts in Toronto crack. The robot would catch a wheel in a crack and stall. We added a slip-detection check that backs the robot off when wheel velocity diverges from commanded velocity for more than 0.4 seconds.
Dust. Clay courts deposit a fine red dust on the camera lens after about 20 minutes. After 90 minutes the lens looks like a sunset. We added a microfiber wipe to the kit and a "clean me" prompt in firmware after a certain confidence-drop signature.
One curious labrador. A neighbour's dog at Stanley Park tennis courts tried to play fetch with the robot. The robot's safety-pause-on-obstacle behaviour kicked in. Dog wandered off. Owner laughed. We added "robust to a curious dog" to the test plan.
What surprised us (good)
The robot drew a crowd. Every single public-court session we ran, we ended up with 2–5 onlookers within 15 minutes. Several asked where they could buy one. Three did. The "field test as marketing" loop is real, and it's free.
The lesson
Move test infrastructure to the field, not your test cases to the lab. Every Vive built in 2024 included at least one outdoor test session before shipping. We're keeping that protocol forever.
— Javad