 Hardware
Hardware
Five generations of gripper, in five pictures

The gripper is the most mechanically interesting part of the Vive robot. It's the bit that has to do the impossible: locate a 6.5 cm fuzzy sphere on uneven ground, scoop it without skidding it across the surface, and feed it into the hopper at speed. Every other system feeds this one.
We've gone through five generations. Here's a quick history.
Gen 1 — The acrylic scoop (Q4 2022)
Bent acrylic, a single servo, no gripper at all in the modern sense. The robot drove the ball into a passive scoop and lifted. Worked indoors on a smooth gym floor. Failed catastrophically on outdoor hardcourt the first time we tested it: a 2mm bump and the ball would bounce out.
Gen 2 — The roller (Q1 2024)
Two counter-rotating foam rollers. The ball gets "pinched" upward, ball-machine style. Worked on every surface but the rollers ate themselves after about 4 hours of court time. We tried four different foam densities. The good news: the geometry was right. The bad news: foam is the wrong material.
Gen 3 — The conveyor (Q2 2024)
One driven belt, one passive idler. Less wear than the rollers. But the belt would sag on its underside and pick up grit on clay, which then ground into the bearings. Two-hour court lifetime in a real session.
Gen 4 — The hybrid (Q4 2024)
This is the one we shipped to the first 30 customers in early 2024. A short, stiff belt on top, a single hard roller below. Quieter, more reliable, but the geometry was overconstrained — it would jam on damaged balls.
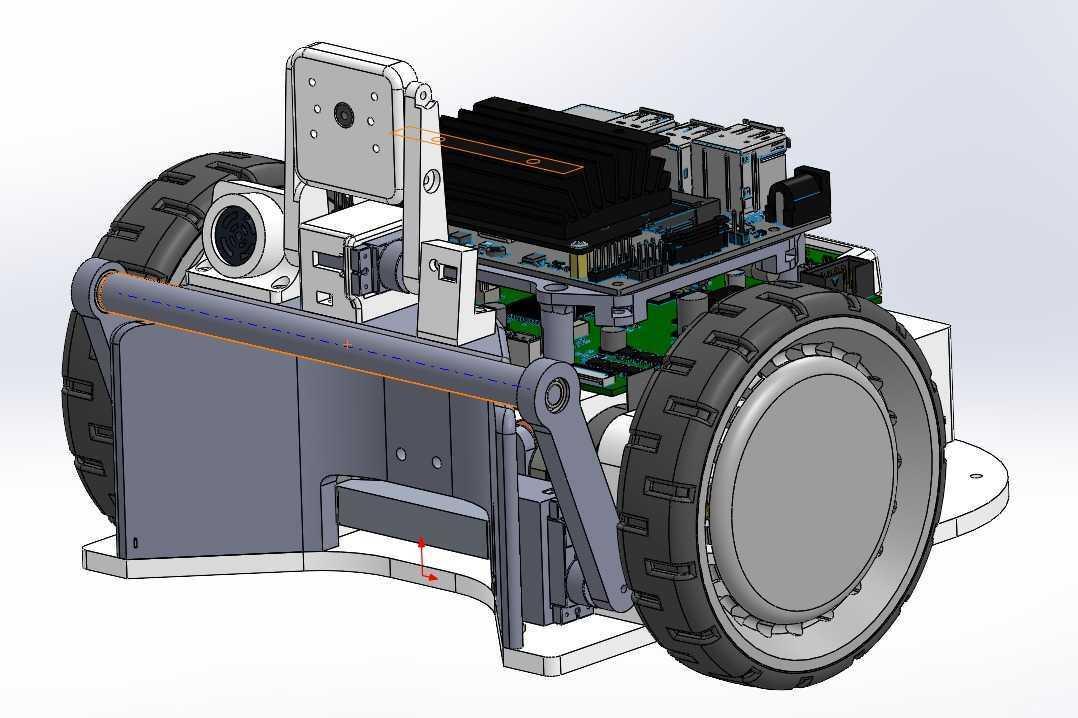
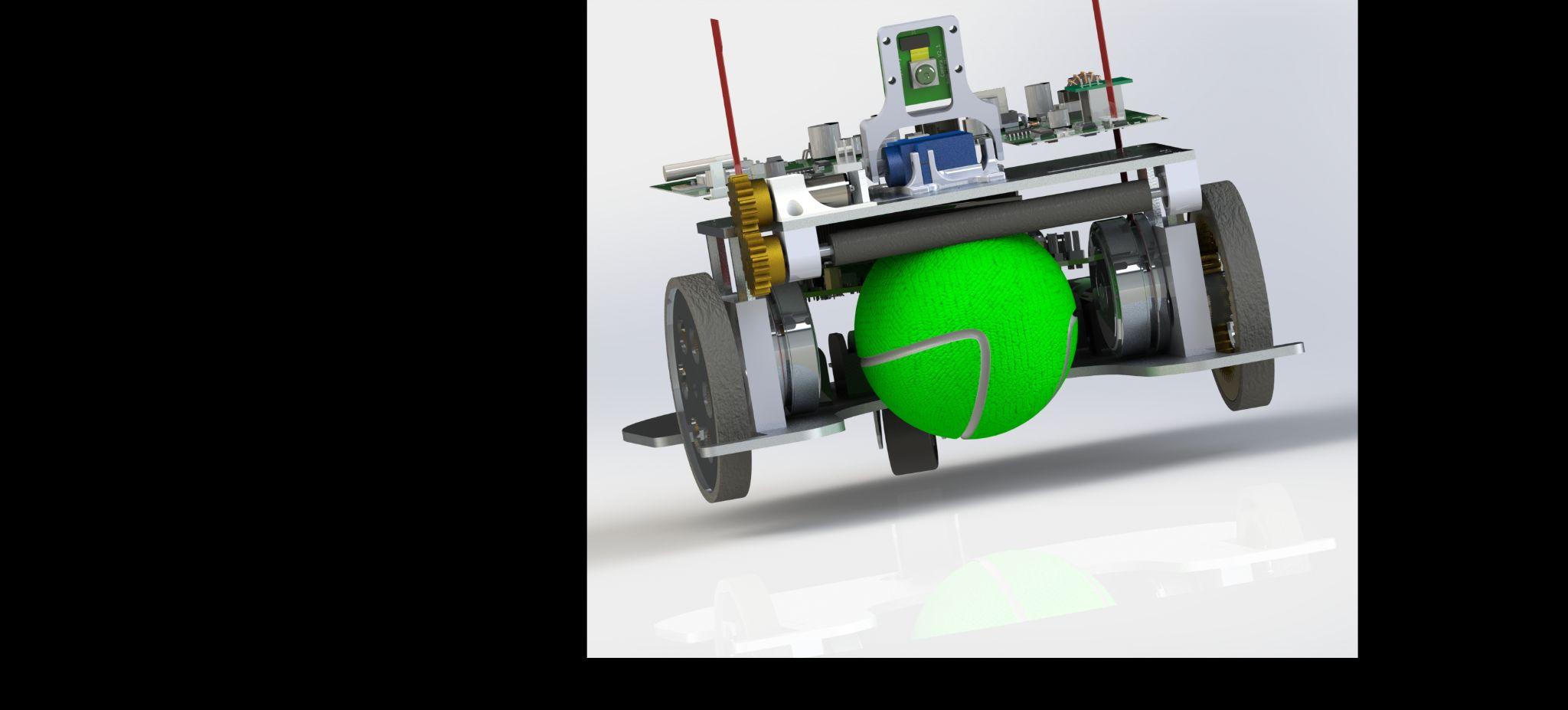
Gen 5 — Today (Q3 2025 →)
One hard roller and a sprung guide arm. The arm gives if it meets a damaged ball, then snaps back. Zero jams in our last 50-unit production batch field tests. This is the geometry on the production unit shipping right now.
The patents on the Gen-5 mechanism are filed. The next generation is in the CAD already — same arm, different motor, smaller package.
— Sina

